With motors there are several designs of which there are advantages of each.
Each motor style has advantages and disadvantages. DC motors are typically smaller both in physical size as well as the torque and power ratings. The advantage however, is that they have small drivers (50x50mm) that can vary the speed of the motor assuming that the load stays constant. The disadvantage of DC motors is that they need a power supply from a suitable 5V/12V/24V supply, and a separate driver board (see below). AC motors can be controlled, however, the modern ones are more likely to feed spikes back into the mains supply, potentially casing issues for sensitive measuring devices. AC motors, have the advantages of larger power ratings and the ease of only the mains lead to connect up to a mains supply via attachment of a plug (by a qualified person).
The first image is of a low end DC motor, one that is generally goes inside as a cheaper toy. The second is a mid/high end unit that has better control and a higher standard. This style of motor only has 2 inputs. To reverse the direction, then the polarity needs reversing (check for reverse protection diodes). The reversing can either be done using a H-bridge controller or by reversing the connections on the motor. This style only needs a variable power supply (potentially 1.5V-6V) to be controlled, hence the suitability for cheaper toys. This kind can have a simple circuit knocked up that can control the speed with an analogue voltage or a dial.
We have a number of those in our store with gearboxes on to enable the output torque and speed to be both manageable and useable. The gearboxes we have, have several ranges that allow for experimentation to find the goldilocks zone for the experiment being carried out.
This type produces some dust from wear on the brushes, however this is minimal, and generally doesn't affect most experiments.
This style can be accurately controlled and the output shaft turned through 1 step at a time. With this motor style there can be 48 or 200 steps per revolution (see datasheet for exact number), so the system can accurately locate a position (needs an initial zeroing of the axis) and then due to the mechanics, hold the output still. The other 3 styles of motor are not typically designed to do so without a separate brake. The issue with this style is it is inherently vibrates more when it moves and it is almost impossible to work nearby when they are moving fast. To reverse this style, the controller need to reverse the signal pattern. This style needs a controller, along with typically 2 signals from a source (typically direction and speed/click) which can be controls on a front panel along with a suitable power supply (3-12V typical).this style generally has 4 or 6 connections dependant upon if it is a bipolar or unipolar device.
This style typically uses no gearbox, because the torque is generally greater than the DC versions, however they do exist.
One issue with this style is that it can be noisy, both audible vibrations (small levels) however, the style is primarily used for small controlled movements, or for holding its position.
This type produces no dust from daily use.
These image are of mid level brushless motors, the left one typically used for modal flying, however it can be used for scientific purposes. The right hand has no particular job, except to rotate. The circuitry allows for a constant and accurate source of rotation. It can also have a very high speed if needed. This style typically has 3 wires; more if the motor will be monitored. To reverse this type there are 2 options; either the controller needs a signal change, or 2 of the 3 wires need switching over (primarily if it is a single direction controller e.g. one that is designed for a RC plane or helicopter). This style needs a controller of similar size to a modern stepper motor drive, along with a power supply (typically 3-12V). This style can be controlled in the same way as a stepper motor, however, due to the model industry this brushless controllers can be easily be run and controlled through a single signal cable (e.g. an Arduino or a pic). We typically have little to do with this style in the lab.
This kind can use gearboxes similar to the DC brushed motors, however, they are not typically used with gearboxes. The torque and rpm is typically decided on by the setup of the windings (Δ or y) and if the motor is an in-runner or out-runner (i.e. if the magnets are within or outside the windings). The out-runner design typically has the outer shell rotating so they are harder to mount, however they typically have screws in the end face which typically is stationary.
This style of motor has similar functionality and size constraints to the brushed DC motors, however due to structural designs, does not hold the capability to spark.
This type produces no dust from daily use.
AC motors are generally operated at mains voltage. This motor style is generally used for operations that don't need to be vibration free, or need to have a fair amount of power such as for vacuum pumps. Typically the larger motors only operate in one direction (typically clockwise), so whilst the installation is easy, they would need rewiring by Electronics (typically John) or Dan before they rotate in the other direction.
There are controllers available that take standard mains and chop it up to reduce the speed of the pump. This would typically be within a feedback loop, requiring a constant non-max speed and controlled by buttons.
Should the user wish to control it manually through a dial, than variacs (variable transformers) can be used. This gives the user a dial to rotate and adjust the voltage(0-100%) of across the motor, however this may not necessarily give the same change in output shaft speed.
Most AC motors use singe phase because 3000W of power is sufficient, however, some can have more power from 3-phase systems. This allows motors to have more power should it be needed.
This type may produce some dust from wear on the brushes depending upon how it is wound, however this is minimal, and generally doesn't affect most experiments.
Standard DC and brushed motors often come as a cylinder, with the length typically bigger than the width, or pancake motors which typically look flattened. Stepper motors are more likely to be a cuboid, and they can come as pancakes. Pancake motors are more typically square instead of circular because of the mounting fixtures. Most AC motors are cuboids, or a cylinder/cuboid cross. This is due to the heat sinking fins that stick out of the cylindrical body vary in length.
 This is a picture of a DC motor with a gearbox attached. The gearbox will come set to a ratio, so if the user wishes to change this then the entire gearbox will typically need changing.
This is a picture of a DC motor with a gearbox attached. The gearbox will come set to a ratio, so if the user wishes to change this then the entire gearbox will typically need changing.
All motor designs can accept a gearbox, however stepper motors generally run slow enough that they don't require a gearbox, however in some cases they are used such as if the motor were running very fast, it can create large amounts of noise.
Most gearbox designs like the pictured, have an offset shaft; the input and output shaft are parallel, but not aligned to each other. A similar design to this is used in manual cars to achieve several gear ranges.
Other similar designs have the two shafts at 90 degrees as standard, but this angle can be specified at cost. This allows longer motors and associated connections to be located closer to a flange so it can be protected, or if it is under a shelf then the shelf can be lower, allowing for more ergonomic or stable setups. A 45 degree angle can allow for a motor to access a shaft close to a 90 degree corner, allowing for more power and potentially control.
Worm gear boxes have the output typically at or close to 90 degrees because of how the teeth mesh. The advantages of this type is they have minimal back rotation, hence they can act in similar ways to a brake if the motor is unpowered, and they are smaller for a given gear ratio. The disadvantages however, is they are have greater wear do to the faces in contact rubbing as opposed to rotation around each other in a traditional gear pairing, and it is harder to get lubrication suitable for the gearbox.
One category of gearbox is a planetary gearbox setup where the output shaft is in line with the input shaft. This allows for the assembly to be able to slide down a uniform hole, and the output shaft line up with the centre of the hole at the end. This design also is not easy to change the ratio, so different ratios need different gearboxes. This design of gearbox is one type that is used in automatic cars where it has reasonable sized clutches holding onto different parts of the gear train.
top
DC Motor Control.
Each kind of DC motor has various drivers that have similar styles of communication. This board along with a suitable power source (e.g. battery or mains-powered supply) and control can be installed into a suitable box. This way, it can be relatively easy to adjust and control the motor speed whilst keeping a reasonably tidy bench. A suitable controller can be around 50-100mm3 (excluding connections) and the power supply and the power supply can be around 100mm*50mm*50mm, however if the electrical noise is too high then the size would need to increase.
The typical connection for a DC motor is to have a pair of MOSFET's connected between the each of the motor connections and both of the power rails. The gate connection is connected to either a microprocessor or a control circuit, setup so that all of the MOSFET's in a single column cannot both be on at the same time. This setup is easy for a DC brushed motors by having one of those for each connector, (making the circuit look like a 'H') and ensuring that they only switch on as diagonally opposite pairs (easy to wire up with a pair of not gates), or only the ones to one rail will switch at any one time. The other two styles need a microprocessor or specialist chip to drive the multiple sets (3 or 4) of MOSFET's due to the precise timing needed.
With the DC brushed motors, they can also work with an op-amp looking at a voltage across a resistor in series with the motor. The op-amp then controls a transistor (type depends upon the power needed) which controls how much current flows through the resistor and motor. If wired right, there can be a potentiometer/low output power analogue voltage (e.g. Lab-jack) controlling the speed of the motor.
The control circuit that turns the MOSFET's on/of in time is controlled by an interface. Fortunately there are some reasonably simple standards that have been kept to so that it is only more modern connectors that are needed to be altered if needed.
 One of the older standards is a 2‑signal interface, typically direction and speed (move/step if for a stepper). With this style, some drivers are designed to have either a variable resistor for the speed and a switch for the direction, or a computer for added control. With the invention of microprocessors, designs were able to work from a single signal wire controlling 4 (brushed motors), 6 (brushless motors) or 8 (stepper motors) transistor banks (2, 3 or 4 pairs). Because of the rc-modal industry, this setup was pushed forward due to the reduced wiring needs. The bi-directional drivers that were developed are setup with a version of PWM, typically called RCPWM or RC-PWM, were at the centre-point of the pulse width range (1.5ms) the motor is stopped, the minimum width (1ms) is full reverse and the maximum width full forward (2ms). This helps in the non-modal setup for when you have several motors being driven from an arduino or pic with limited outputs and all of the motors potentially being driven at different speeds. Each of the RCPWM outputs can potentially drive several motor drives, however, this would be a non-standard method.
One of the older standards is a 2‑signal interface, typically direction and speed (move/step if for a stepper). With this style, some drivers are designed to have either a variable resistor for the speed and a switch for the direction, or a computer for added control. With the invention of microprocessors, designs were able to work from a single signal wire controlling 4 (brushed motors), 6 (brushless motors) or 8 (stepper motors) transistor banks (2, 3 or 4 pairs). Because of the rc-modal industry, this setup was pushed forward due to the reduced wiring needs. The bi-directional drivers that were developed are setup with a version of PWM, typically called RCPWM or RC-PWM, were at the centre-point of the pulse width range (1.5ms) the motor is stopped, the minimum width (1ms) is full reverse and the maximum width full forward (2ms). This helps in the non-modal setup for when you have several motors being driven from an arduino or pic with limited outputs and all of the motors potentially being driven at different speeds. Each of the RCPWM outputs can potentially drive several motor drives, however, this would be a non-standard method.
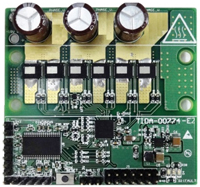
Many modern motor control units (non modal specific) have USB control or capability. This allows the computer (or other USB master) to control the speed/direction of the motor along with having the capability to read back data such as temperature of the board or motor (if compatable), current consumption, source voltage or actual speed (as opposed to requested speed). Here is one board with USB, on-board control and RC‑PWM capabilities. The boards that are available are either capable of multiple types of interfacing, or only one type. This allows for cheaper units at around £10 and more expensive ones starting at £40 for the multiple forms of communication.
One issue with all three kinds of DC motor and driver is that they cannot use the same driver board as other motor designs unless the board is designed to accommodate multiple types, typically more costly. This is down the fact that each of the connections to the motor will have a transistor to both the positive and negative rail. The micro-processor that controls the pairs of transistors will trigger each transistor according to what it is initially programmed for. Should the motor style be changed, then it will still think it is the original type, and either stall the motor or act sporadically, depending upon which motor and setup is used. Some controllers will have a switch or link to switch between the types.
With all three types of DC motor and driver, it is recommended to have the motor, the driver and power supply as close as possible. This is because the resistance of the wire can reduce the efficiency of the setup. When operating at currents greater than 0.5A for motors, the power cables should also be as thick as possible. This reduces the resistance, and hence the power dissipation.
AC Motor Control.
AC motors are harder to control because the standard waveform(s) is a sine wave on each pin.
In general there are 3 types of control;
A switch to turn it on/of and another for direction. This gives the user a constant speed, but the ability to control if the motor is running, and in which direction. Some motors are unable to have the 'direction change' switch due to how they are wired up. There is normally a capacitor to ensure that the motor runs in a consistent direction; if this is inaccessible then the motor can only spin in one direction.
A variac, (variable transformer) that can vary the voltage applied to the motor. This has the benefit of changing the speed, however it also changes the current characteristics, so care needs to be taken not to exceed the current rating on the variac; typically 2A on the variacs we have (we have some at 8A, but not so many).
Or an intelligent control unit that take mains voltage in and stick out a portion of the mains. This utilises a triac (or similar) to reduce the time that the motor is on for (fed by a signal from a potentiometer and a few other components). This gives more control but can lead to spikes in voltage and current that can cause damage if too large for the motor winding insulation. This style can also feed noise back along the mains cable, to be picked up by other devices attached to the same circuit. This noise issue can be alleviated with sufficient filtering, however, net every controller has sufficient or suitable filtering.
top